


一、團隊簡介
人工智能與機器人科研教學團隊(GAIR:Group of Artificial Intelligence and Robotics)植根于當今高速發展的智能科學技術的文化源泉,根據自動化科學與智能化科學交融共進的發展趨勢,立足于自動化科學與工程學科的建設與發展,按照大灣區和廣東省社會經濟發展的戰略方針,瞄準人工智能的産業變革核心方向,以産學研相結合的方式促進技術創新。主要開展人工智能與機器人科學的應用基礎研究,并緻力于智能康複機器人、專用服務機器人、多機器人微裝配等方面的關鍵性技術研發。以科研創新帶動教學質量水平的不斷提升,為人才培養的長遠發展目标提供動力。團隊成員曾負責完成和在研國家自然科學基金、國家863項目、國家攀登計劃項目的子課題、國家重點基礎研究(973)項目子課題、科技部國際合作項目,以及廣東省重大專項、廣東省自然科學基金、廣東省粵莞聯合基金等項目;也曾獲得過省部級科技獎和廣東省優秀在線課程獎等榮譽;指導學生獲Robotcup冠軍,Robotmaster優秀獎等。
二、主要研究方向與成員分布
人工智能及其工程應用(秦世引,呂賜興,王福傑,孫澤文,郭芳,秦斐燕)
智能康複機器人、專用服務機器人(任斌,韓清濤,沈博,張瑞,胡亞偉)
圖像處理與機器視覺(秦世引,呂賜興,姜鳴,孫澤文)
模式識别與機器學習(秦世引,張瑞,姜鳴,孫澤文,秦斐燕)
多機器人微裝配與智能制造(秦世引,王志平,王福傑,孫澤文,胡亞偉)
機器人環境感知與SLAM技術(秦世引,王志平,孫澤文,沈博)
量子機器學習與機器人智能優化管控(秦世引,孫澤文)
網絡化智能機器人群體的協同優化管控(秦世引,任斌,劉學良,秦毅,王福傑,孫澤文)
微機電系統的優化控制與協同控制(秦毅)
三、團隊成員
秦世引 | |
秦世引,浙江大學畢業工學博士,東莞理工學院教授,北京航空航天大學教授,博士生導師,國際刊《Mathematics of Computation and Data Science》編委(Associate Editor)。曾任北京航空航天大學模式識别與智能系統學科責任教授,學科帶頭人。曾任中國人工智能學會秘書長(2001-2010),常務理事(2001-2010),智能控制與智能管理專業委員會副主任(2001-2015);《智能系統學報》編委會副主任(2006-2012);中國自動化學會智能自動化專業委員會委員(1998-2010),系統複雜性專業委員會委員。國際系統工程學會理事。1999年入選“北京市跨世紀優秀人才工程”人選。 長期從事控制科學與工程,模式識别與人工智能,智能控制理論及其應用,複雜系統與複雜性科學等方面的科研與澳门金莎。作為負責人完成國家攀登計劃項目的子項目;國家重點基礎研究(973)項目的子課題;國家863項目;國家自然科學基金項目;科技部國際合作項目;國防科技預研基金項目;武器裝備預研基金項目;教育部骨幹教師資助計劃項目;國家重點實驗室基金項目;北京市跨世紀優秀人才基金項目;北京市教委科技發展項目等30餘項。發表學術論文280餘篇;合著出版學術專著1部,研究生教材1部,譯著2部,主編國際會議文集2部。與羅公亮合著的學術專著《智能控制導論》于1999年獲“全國優秀科技圖書獎”暨“科技進步獎(科技著作)”一等獎;與交通部水運規劃設計院合作開發的“港口工程總平面CAD軟件系統”于1999年獲“國家第五屆工程設計優秀軟件金獎”;2014年獲中國人民解放軍科技進步二等獎1項;2017年獲中國自動化學會技術發明一等獎1項。目前的主要研究方向和興趣為:模式識别與人工智能,網絡化多機器人群體系統的智能優化控制,智能機器人SLAM,圖像處理與機器視覺等。 郵箱:qsy@buaa.edu.cn;辦公地點:9A403室
|
|
任斌 | |
任斌,博士,教授,中山大學和華南理工大學研究生導師,電子工程與智能化學院副院長,廣東省先進自動化工程技術研發中心和東莞市工業機器人重點實驗室主任,機器人與智能控制研究所所長,大學生機器人創新實驗室負責人,粵港機器人學院常務副院長,廣東省高等學校“千百十工程”人才第八批省級培養對象,廣東省高校嵌入式與測量系統工程技術開發中心副主任。2003年應屆畢業進入東莞理工學院工作。主要研究方向為智能控制系統、自動化裝備和機器視覺等。近5年,主持或作為主要完成人參與省部級項目12項、橫向項目9項;發表學術論文40餘篇,其中SCI、EI收錄18篇。以第一完成人身份獲得東莞市科學技術獎勵三等獎1項、吳文俊人工智能科技進步獎三等獎1項,以參與者身份獲東莞市科技進步二等獎2項,申請專利18件,其中授權發明專利4件,實用新型專利12件,軟件著作權2項。 郵箱:renbin@dgut.edu.cn;辦公地點:9A401B室
|
|
王志平 | |
王志平,男,1978年5月出生,廣東東莞人,博士,研究員,碩士研究生導師。2001年華南理工大學自動化專業畢業,獲學士學位;2007年華南理工大學軟件工程專業畢業,獲碩士學位;2010開始在華南理工大學電力學院攻讀電力電子與電力傳動專業博士學位。2001年至2017年,廣東省智能制造研究所(原廣東省自動化研究所)信息處理團隊負責人;2017年至今東莞理工學院教授。2019年10月,到東莞市工業和信息化局挂職擔任副局長。主持或主要參加的科技部、省級科研項目14項(其中廣東省重大科技專項1項,廣州市珠江科技新星專項1項),廣東省科學院青年澳门金莎基金1項,市和區項目多項。主持或主要參加技術開發項目6項。發表科技論文14篇(SCI收錄5篇,EI收錄5篇)、獲授權發明專利5件、獲授權實用新型專利2件、獲軟件版權5項。多次被中國科學院廣州分院、廣東省科學院評為優秀青年科技工作者、優秀共産黨員和團員幹部。廣東省、廣州市和東莞市科技專家庫入庫專家。2012年被廣州市認定為珠江科技新星并專項支持。 郵箱:wzping@21cn.com;辦公地點:9A402室 |
|
呂賜興 | |
呂賜興,博士,教授,碩士生導師。十餘年來一直從事制造物聯、智能工廠、雲制造等領域的基礎理論與工程應用研究,先後負責和參與了國家自然科學基金、國家863計劃、國家科技支撐計劃、智能制造專項以及企業委托等20餘項課題。發表學術論文10餘篇,其中被EI收錄8、SCI收錄2篇。獲省級自然科學二等獎1項(排名第三)。 |
|
韓清濤 | |
韓清濤,電子工程與智能化學院副教授,1987.9-1987.7本科畢業于哈爾濱工程大學,專業自動控制,2004.4-2007.6碩士研究生畢業于廣東工業大學,專業自動控制,2002年開始進入東莞理工學院工作,講授多門課程包括《自動控制原理》、《電梯控制》、《PLC原理與設計》、《微機原理與系統設計》等。發表科研論文10餘篇,主持省部級科研項目多項,獲得東莞市科技進步二等獎,當前研究領域包括:自動控制、機器視覺檢測。 郵箱:hanqt@dgut.edu.cn;辦公地點:9A403室 |
|
張瑞 | |
張瑞,博士,副教授,碩士生導師,2016年博士畢業于華南理工大學模式識别與智能系統專業;中國圖象圖形學學會優秀博士學位論文提名獎獲得者;主持國家自然科學基金項目1項、粵港澳大灣區腦科學與類腦研究項目1項;發表SCI論文10餘篇,其中以第一作者發表在IEEE TBME和IEEE TNSRE上的兩篇論文分别被評為封面論文和亮點論文。研究方向為模式識别、腦信号處理。 郵箱:ruizhang@dgut.edu.cn;辦公地點:9A403室 |
|
姜鳴 | |
姜鳴,男,博士,副教授。2012年07月到東莞理工學院工作,2013年03月獲控制理論與控制工程講師技術職稱,2018年12月獲控制理論與控制工程副教授技術職稱。主持廣東省自然科學基金項目1項,市級項目2項,參與國家級、省市級項目13項,發表科研論文20餘篇,發标專利10餘項。2014年獲廣東省高校“千百十人才培養工程”校級培養對象。系統講授了《自動控制原理》《MATLAB與應用》《專業英語》《高等數學(上、下)》等課程,主持校級教改項目1項,發表教改論文2篇。指導大學生創新創業項目,省級1項、市級1項。指導學生參加各項大學生競賽,累計獲得國家級二等獎2項、三等獎1項,省級各獎項9項。2015.09-2016.10挂職東莞市經信局工作1年,任局長助理。2016-2017學年、2017-2018學年東莞理工學院優秀教師。2018年獲廣東省第四屆高校(本科)青年教師教學大賽,工科組二等獎。 目前的科研工作主要圍繞“光伏發電功率短期預測”展開,建立自動氣象站數據采集系統,對2-4小時内的短期輻照強度進行預測,并推算光伏電站短期未來發電功率,為電網調度提供決策依據。研究内容涉及數字信号處理、智能預測算法、機器學習等。 郵箱:jiangm@dgut.edu.cn;辦公地點:9A403室 |
|
劉學良 | |
劉學良,男,博士,副教授,2012年6月畢業于華南理工大學控制理論與控制工程專業,自參加工作以來,發表科研論文10餘篇,其中SCI檢索6篇,EI檢索5篇,擔任IET Control Theory & Applications, Asian Journal of Control, CCC等國際期刊和會議的審稿專家,主持省科技項目2項,參與國家、省級項目6項,本人感興趣的研究方向包括多機器人系統,自主車隊系統,非線性系統等。 郵箱:liuxl@dgut.edu.cn;辦公地點:9A403室 |
|
王福傑 | |
王福傑,男,講師/碩士生導師。2018年博士畢業于廣東工業大學,攻讀專業為控制科學與工程,2017年曾到The University of Newcastle, Australia擔任訪問學者(合作導師:Prof. Fu MinYue),2019年任職于東莞理工學院電子工程與智能化學院,從事電氣、自動化、電子、機器人、智能制造專業的教學科研工作。先後參與國家自然科學基金項目、廣東省傑出青年基金項目,主持廣東省自然科學基金項目面上項目、廣東省高校青年創新人才項目等縱向橫向項目,以第一作者(或導師第一學生第二)/通訊作者發表SCI/EI論文10餘篇,其中JCR1區期刊論文4篇,2區論文2篇,申請發明專利14項,授權1項。主要研究方向包括:機器人智能控制、機器人微裝配、自主學習算法、機器學習、視覺伺服控制。 郵箱:wangfujie128@gmail.com;辦公地點:9A403室 |
|
秦毅 | |
秦毅,男,1987.05.28生。秦毅從江南大學獲得本科與碩士學位,之後于華南理工大學獲得博士學位,2018年7月加入東莞理工學院,在碩士、博士、以及東莞理工學院電子工程與智能化學院任教期間一直緻力于微機電系統控制和微納米器件控制問題的研究。目前,作為主要參與人參與國家自然科學基金項目與廣東省自然科學基金,主持廣東省粵莞聯合基金青年基金,已發表SCI/EI論文5篇,申請發明專利4項。 郵箱:qinyidee@163.com;辦公地點:9A110室 |
|
孫澤文 | |
孫澤文,男,1990年生,博士。2012年畢業于華東理工大學自動化專業獲學士學位,之後保送華東理工大學控制科學與工程一級博士點碩博連讀,2017年底獲博士學位。曾到北科大、同濟、西交大、國防科大交流研讨學習。曾受管理學資深汪應洛院士指點,獲錢旭紅院士授理工優秀生。參與過多項國家自然科學基金面上項目、中央高校基本科研業務專項資金、上海市科委基礎研究重點項目等。連續多年擔任IJPR雜志審稿人,ICIC,CPCC,CCDC,CCC等大會審稿人。主要研究方向為:智能優化,人工智能,工業過程建模分析。 郵箱:sunzw@dgut.edu.cn;辦公地點:9A403室 |
|
郭芳 | |
郭芳,女,博士,2014年7月畢業于山西師範大學數學與計算機科學學院,獲理學學士學位;2019年9月畢業于華南理工大學自動化科學與工程學院,獲工學博士學位;2019年10月起就職于東莞理工學院電子工程與智能化學院,擔任講師。研究領域包括柔性結構振動控制、分布參數系統控制、機器人學。 博士期間作為主要研究人員參與廣東省産學研合作項目、華南理工大學中央高校科研業務費重點項目、廣東省高新技術項目等,且主持粵莞聯合基金青年基金項目。在國際國内知名期刊和會議上發表論文10餘篇,其中包括第一作者SCI期刊論文5篇、EI期刊論文1篇、EI會議論文5篇,第二作者SCI期刊論文3篇。 郵箱:2019091@dgut.edu.cn;辦公地點:9A110室 |
|
沈博 | |
沈博,博士,2010年東北大學自動化專業畢業,獲得學士學位;2013年沈陽工業大學檢測技術及自動化專業畢業,獲得碩士學位;2016年于日本高知工科大學系統工程學科基礎工學專業畢業,獲得博士學位;2017年獲得日本文部科學省獎學金。2016年至2019年,在日本高知工科大學綜合技術研究所高級機器人研究中心任助理研究員,主持一項日本文部科學省青年基金(19K20742);獲獎情況IEEE ROBIO2015 Finalist of Best Student Paper Award ,日本生物醫學與模糊系統學會,貢獻獎,IEEE ICMA AWARD for ICMA 2018 Best Paper in Automation;第一作者發表期刊論文7篇,國際會議論文12篇,日本國内會議9篇,聯名發表28篇,期中EI收錄8篇。主要研究方向:福祉機器人、意圖識别,機器人運動控制 郵箱:shenbo_dgut@163.com;辦公地點:9A401室 |
|
秦斐燕 | |
秦斐燕,女,博士,東莞理工學院講師。2018年于中國科學院大學獲模式識别與智能系統博士學位。曾任職于中國科學院深圳先進技術研究院。2018年9月至今任職東莞理工學院自動化系。先後參與多項國家級項目。目前主持粵莞聯合基金青年基金項目1項和東莞理工學院博士啟動基金項目1項。發表SCI論文2篇,EI收錄論文多篇。主要研究方向:新能源汽車智能控制、駕駛環境理解與汽車電子。 郵箱:qinfy@dgut.edu.cn;辦公地點:9A403室 |
|
胡亞偉 | |
胡亞偉,東莞理工學院電子工程與智能化學院實驗員,參與多門課程的實驗工作(如電氣工程課程、自動化課程),熟練掌握西門子智能制造軟件、PLC編程,帶領多支隊伍參加全國西門子杯智能制造挑戰杯并獲得一等獎、全國robotcon比賽一等獎等,目前作為項目骨幹參與多項國家級、省部級科研項目,獨立開發出多條自動化智能制造生産線,持有多項發明專利、實用新型專利和軟件著作權,主要研究方向包括智能制造、PLC控制、孿生雙胞胎控制系統、機器人控制。 郵箱:huyw@dgut.edu.cn;辦公地點:8B110室 |
|














四、依托平台
1.校内平台:課題組隸屬于廣東省先進自動化工程技術研發中心和工業機器人重點實驗室、廣東省高校嵌入式與測量系統工程技術開發中心,實驗條件和場地優良、各種資源豐富。課題組已擁有所需要的各種系統設計、分析和測試軟件,包括AutoCAD、Pro/E、SolidWorks、UG、ADAMS、ANSYS、LabVIEW、MatLab、ROBOTCAD等專業軟件工具,提供了良好的軟件條件。智能機器人實驗室和先進工業機器人實驗室擁有加工中心一台、安川Motoman機器人一台、廣州數控工業機器人6台、ABB1410兩台及搬運、碼垛、上下料集成應用方案一套,發那科的機器人4台及切割、分撿、打磨集成應用方案各一套,Kuka的Youbot移動操作臂一台、丹麥的模塊化UR機器人一台、自行研制的并聯機器人及傳送系統一套、SCARA機器人兩台、多種機器人模塊(包括關節模塊和末端功能模塊)和模塊化機器人系統、U盤仿真機器人生産線一條,如圖1-2所示。
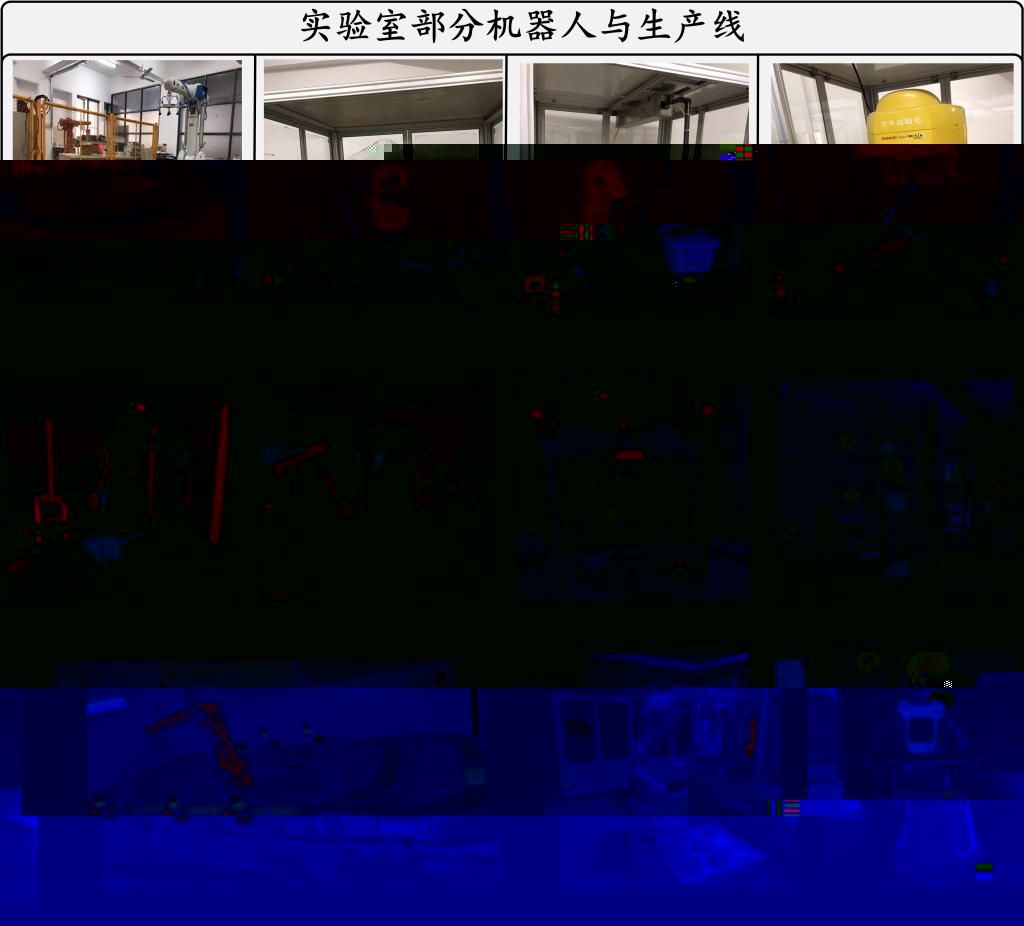
圖1校内依托平台部分機器人與産線展示
圖2校内依托平台挂牌情況
2.校外平台:團隊與東莞市工業機器人重點實驗室,東莞松山湖機器人基地、香港科技大學機器人研究所、美國伍斯特理工學院機器人研究中心等著名大學和研究機構有長期的合作關系,為本團隊提供充足的技術、硬件、軟件支持。
五、近五年團隊成員代表性科研項目
1. “基于多模态信号腦機協調控制及其應用研究”,國家青年科學基金項目(61703101),項目經費:25萬元
2. “基于深度學習的供應鍊管控方法”,國家重點研發計劃子課題(2018YFB1004000004),項目經費:130.55萬元
3. “智能LCM模組全自動生産設備的研制”,廣東省科技廳項目(2015A010104012),項目經費:128萬元
4. “面向3C行業智能打磨抛光機器人關鍵技術研究及産業化”,廣東省科技計劃項目(協同創新與平台環境建設方向,2016B090918132),項目經費:100萬元
5. “面向3C行業低成本六自由度輕載智能機器人研發及集成示範應用”廣東省應用型重大專項項目(2015B090922014),項目經費:100萬元
6. “新一代高效節能太陽能熱泵閉環除濕幹燥機關鍵技術研究及産業化”,廣東省科技廳項目(2017B020240001),項目經費:60萬元
7. “智能AGV搬運機器人關鍵技術研究與應用開發”,廣東省科技計劃項目(2014A050503068),項目經費:50萬元
8. “虛實一體化的柔性工業機器人自主學習關鍵技術研究”,廣東省自然科學基金重點項目子課題(已公示),項目經費:30萬元
9. “3C行業輕載高效智能機器人的設計理論與控制研究”,廣東省普通高校特色創新類項目(2018KTSCX226),項目經費:20萬元
10. “腦機互适應協同控制技術與上肢運動康複研究”,粵港澳大灣區腦科學與類腦研究中心開放課題(省部級,2019015),項目經費:15萬元
11. “光伏電站發電功率短期預測模型關鍵技術研究”,廣東省自然科學基金(自由申報項目,2016A030313134),項目經費:10萬元
12. “基于核學習理論和人工神經網絡的城鎮空氣質量建模及預報預警系統”,廣東省自然科學基金項目(2014A030313629),項目經費:10萬元
13. “具有輸入輸出約束的分布式非标定視覺伺服機械臂協調控制研究”,廣東省自然科學基金面上項目(2019A1515010493),項目經費:10萬元
14. “網絡化分數階多智能體系統一緻性控制研究”,廣東省博士啟動基金(2014A030310418),項目經費:10萬元
15. “面向激光雷達光學成像系統的MEMS掃描微鏡視景最大化滑模自适應優化控制研究”,廣東省自然科學基金粵莞基金(已公示),項目經費:10萬元
16. “面向物流搬運的移動柔性機械臂運動軌迹的高性能跟蹤控制”,廣東省自然科學基金粵莞基金(2019A1515110477),項目經費:10萬元
17. “混合動力電動汽車動态能量配置的量子進化智能優化技術研究”,廣東省自然科學基金粵莞基金(2019A1515110802),項目經費:10萬元
18. “具有輸入輸出約束的非标定視覺伺服機械臂智能控制研究”,廣東省青年創新人才類項目(2018KQNCX252),項目經費:10萬元
19. “分布式光伏發電系統輸出功率超短期預測關鍵技術研究”,廣東省高等學校“創新強校工程”創新項目(2014KQNCX221),項目經費:10萬元
20. 在線式智能高速精密噴射點膠系統關鍵技術研究及産業化,東莞市科技局項目(20160918006),項目經費:25萬元
21. “新型通道安檢機的關鍵技術研究及其産業化”,東莞市科技局項目(20160926),項目經費:20萬元
六、近五年團隊成員代表性科研論文
1. R. Zhang, S. He, X. Yang, X. Wang, K. Li, Q. Huang, Z. Gu, Z. Yu, X. Zhang, D. Tang, Y. Li*. “An EOG-based Human Machine Interface to Control a Smart Home Environment for Patients with Severe Spinal Cord Injuries”, IEEE Transactions on Biomedical Engineering, vol. 66, no. 1,pp. 89 – 100, Jan. 2019. (SCI, 1區收錄)
2. R. Zhang, Q. Wang, K. Li, S. He, S. Qin, Z. Feng, Y. Chen, P. Song, T. Yang, Y. Zhang, Z. Yu, Y. Hu, M. Shao*, Y. Li*, “A BCI-based Environmental Control System for Patients with Severe Spinal Cord Injuries”, IEEE Transactions on Biomedical Engineering, vol. 64, no. 8,pp. 1959– 1971, Aug. 2017. (SCI, 1區收錄)
3. F. Wang, Z. Liu, C. L. P. Chen, and Y. Zhang, “Synchronized adaptive control for coordinating manipulators with time-varying actuator constraint and uncertain dynamics,” Int. J. Robust Nonlinear Control, vol. 29, no. 12, pp. 4149–4167, 2019. (SCI, 1區收錄)
4. F. Wang, Z. Liu, C. L. P. Chen, and Y. Zhang, “Robust adaptive visual tracking control for uncertain robotic systems with unknown dead-zone inputs,” Journal of the Franklin Institute, vol. 356, no. 12, pp. 6255–6279, Aug. 2019. (SCI, 1區收錄)
5. L. Li, S. Qin*, Z. Lu, K. Xu, Z. Hu, “One-shot learning gesture recognition based on joint training of 3D ResNet and memory module”, Multimedia Tools and Applications, vol.79, pp. 6727–6757, 2020.(SCI,2區收錄)
6. X. L. Liu*, Z. Zhang and H. Z. Liu,Consensus Control of Fractional-Order Systems Based on Delayed State Fractional Order Derivative,Asian Journal of Control, vol.19, no.6, PP. 2199-2210, 2017.(SCI收錄)
7. X. L. Liu, H.Z. Liu, S.J. Wang, Z. Zhang and Y. G. Liu*,Improvement for coordination performance of fractional-order systems based on weighted state and relative state information,Advances in Mechanical Engineering,vol. 9, no. 4, PP. 1–9, 2017.(SCI收錄)
8. X. L. Liu, S. B. Xu*, Pinning Adaptive Synchronization of Delayed Coupled Dynamical Networks via Periodically Intermittent Control, Mathematical Problems in Engineering,3817805,PP: 1-8, 2017.(SCI收錄)
9. X. L. Liu, B. G. Xu*, L. H. Xie. Distributed tracking control of second- order multi-agent systems under measurement noises, Journal of system science and complexity,vol.27, no.5, PP. 853-865, 2014. (SCI收錄)
10. S. Luo and B. Ren*, “The monitoring and managing application of cloud computing based on internet of things,” Computer Methods and Programs in Biomedicine, vol. 130, pp. 154–161, Jul. 2016.(SCI收錄)
11. B. Ren, T. Huang, and R. Xia, “A new robot design for martial arts arena simulation,” International Journal of Simulation: Systems, Science and Technology, vol. 17, p. 3.1-3.6, Jan. 2016.(EI收錄)
12. B. Ren, R. Xia, and T. Huang, “Design of goal keeper’s strategy based on microsoft 5vs5 soccer simulation,” vol. 17, p. 8.1-8.7, Jan.(EI收錄)
13. 姜鳴,趙紅宇,劉學良, "一種基于聚類分析的自适應步态檢測方法",鄭州大學學報(工學版), 38(3): 62-66, 2017.(EI收錄)
14. M. Jiang, J. Cao, "Positive-Unlabeled Learning for Pupylation Sites Prediction", BioMed Research International, page 5, 2016.(EI收錄)
15. 姜鳴,仇森,趙洋,張志, "基于慣性測量器件的無線步态分析平台",大連理工大學學報, 56(5): 518-524, 2016.(EI收錄)
七、近五年團隊成員代表性發明專利
1. 任斌,黃銳林,黃維聰,等,一種基于機器視覺的對工業産品分類的方法,授權号:ZL201510474099.3,授權日期:2019-01-29
2. 姜鳴,張志,一種适用于風光發電功率預測的氣象預測設備,授權号:201721449315.X,授權日期:2018.05.11
3. 姜鳴,張志,基于數據融合技術的多氣象因子遠程監測設備,授權号:201721449429.4,授權日期:2018-05-11
4. 任斌,朱志超,李焯填,等,一種登山柺檢測系統及其檢測方法,授權号:ZL201510474088.5,授權日期:2017-04-12
5. 任斌,餘澤超,林澤凱,等,示波器,授權号:ZL201410284448.0,授權日期:2016-08-24
6. 秦毅,王福傑,郭芳,等,帶側面電極的2D靜電驅動MEMS扭轉微鏡一階滑模和Twisting控制,中國發明專利申請,申請号:202010217152.2,申請日期:2020-03-25
7. 秦毅,王福傑,郭芳,等,側面電極的2D靜電驅動MEMS扭轉微鏡二階積分滑模控制,中國發明專利申請,申請号:202010216889.2,申請日期:2020-03-25
8. 秦毅,陳輝,姚智偉,等,一種基于2D電磁驅動MEMS扭轉微鏡的顯示器,中國發明專利申請,申請号:202010381384.1,申請日期:2020-05-08
9. 秦毅,陳輝,姚智偉,等,一種扭轉微鏡的跟蹤掃描系統,中國發明專利申請,申請号:202010381395.X,申請日期:2020-05-08
10. 姚智偉,曾文健,秦毅等,一種基于深度學習的簡曆識别和智能分類篩選系統,中國發明專利申請,申請号:201921139095.x,申請日期:2019-05-19
11. 王福傑,秦毅,郭芳,等,基于實時力控的裝配機器人重力補償控制裝置及方法,中國發明專利申請,申請号:202010483656.9,申請日期:2020-06-01
12. 王福傑,秦毅,郭芳,等,一種新型的自主裝配機器人路徑規劃自主導航系統及方法,中國發明專利申請,申請号:202010483403.1,申請日期:2020-06-01
13. 王福傑,林政宇,張佳甯,等,任斌.一種教學用電磁炮,中國發明專利申請,申請号:202010040735.2,申請日期:2020-01-15
14. 王福傑,張佳甯,姚智偉,等,李裕榮.一種針對柔性機械臂的振動控制器,中國發明專利申請,申請号:201911098016.X,申請日期:2019-11-12
15. 王福傑,姚智偉,秦毅,等,一種基于位置與速度人工勢場法的無人機路徑規劃方法,中國發明專利申請,申請号:201911068807.8,申請日期:2019-11-05
八、近五年團隊成員代表性獎勵
1. 第五屆吳文俊人工智能科學技術獎三等獎
2. 廣東省教育教學成果獎省級一等獎:賽教融合應用引領的自動化類專業人才培養模式
